Abstract:
Task-level programming of industrial robots requires the automatical and sensor-guided planning of collision-free motions in the presence of obstacles. If the robot's env...Show MoreMetadata
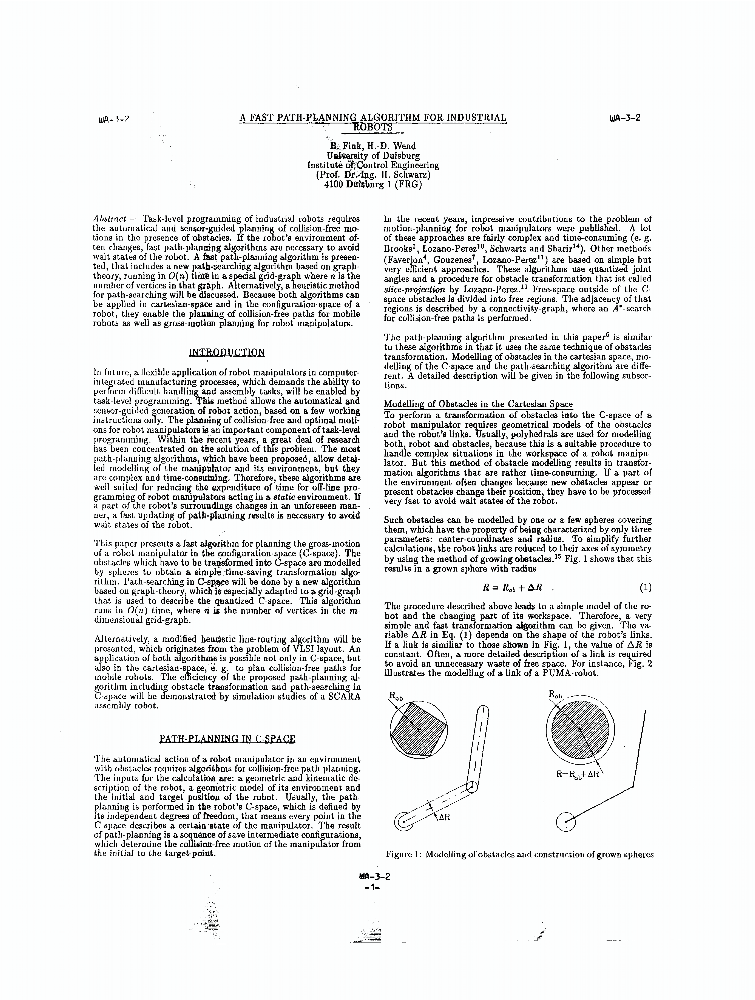
First Page of the Article
Abstract:
Task-level programming of industrial robots requires the automatical and sensor-guided planning of collision-free motions in the presence of obstacles. If the robot's environment of ten changes, fast path-planning algorithms are necessary to avoid wait states of the robot. A fast path-planning algorithm is presented, that includes a new path-searching algorithm based on graph theory, running in O(n) tinid in a special grid-graph where n is the number of vertices in that graph. Alternatively, a heuristic method for path-searching will be discussed. Because both algorithms can be applied in cartesian-space and in the configuration-space of a robot, they enable the planning of collision-free paths for mobile robots as well as gross-motion planning for robot manipulators.
Date of Conference: 03-06 April 1989
Date Added to IEEE Xplore: 06 August 2002
First Page of the Article
